Grundfälle der ebenen Vektoralgebra
Oktober 2020
Keywords: Webkinematik, Webentwicklung, Getriebekinematik, Mechanismentechnik, Bewegungsübertragung, Kraftübertragung, Vektoralgebra, g2, mec2
6.2 Grundfall II/III
6.2.1 Aufgabenstellung
Analysieren Sie den Mechanismus und stellen Sie ihn anschließend mit g2 interaktiv im Browser dar.
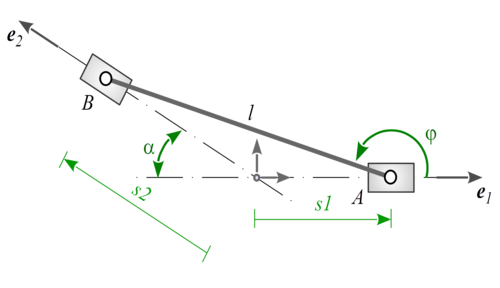
Abb. 6.2: Gegebener Mechanismus
Geg.:
Lösung:
Um den Mechanismus interaktiv in ein Canvas zu rendern benötigen wir die Koordinaten der Punkte A und B in Abhängigkeit der Laufvariable s1.
6.2.2 Mathematik
Aufstellen der Maschengleichung und Sortieren nach Bekannten und Unbekannten liefert Grundfall II:
mit
Nimmt man bei dem selben Mechanismus z.B. den Winkel
als bekannt und oder als unbekannt an, lässt sich Grundfall III identifizieren. Die Lösung von diesem erfolgt analog.
und da
Grundfall II
Lösungen
Mit getauschten Variablen ergeben sich für unseren Mechanismus die Lösungen:
Daraus folgt wiederum der Winkel
6.2.3 Code
Da alle notwendigen Analysen nun getätigt wurden kann mit der Umsetzung in HTML und JavaScript begonnen werden. Wir erstellen ein 450x300px Canvas, einen Range-Input für s1 sowie die üblichen globalen JS Variablen inklusive folgendem mec-Objekt:
mec = {
l: 100,
alpha: 30*pi/180,
get g() { return {x:s1, y:0}; },
get e2() { return {x:Math.cos(pi - this.alpha), y:Math.sin(pi - this.alpha)} },
get s2() { var ge2 = this.g.x*this.e2.x + this.g.y*this.e2.y,
ge2g = (this.g.x*(-this.e2.y) + this.g.y*this.e2.x);
return ge2 + Math.sqrt( this.l*this.l - ge2g*ge2g ); },
// eigentlich nicht benoetigt
get phi() { return Math.atan2( (1/this.l)*this.s2*this.e2.y, (1/this.l)*this.s2*(this.e2.x - s1) ); },
get ephi() { return {x:Math.cos(this.phi), y:Math.sin(this.phi)}; },
// Gelenkpunkte
get A() { return {x:s1, y:0}; },
get B() { var s2 = this.s2; return {x:s2*this.e2.x, y:s2*this.e2.y}; }
},
Die Getter für phi und ephi werden von uns eigentlich nicht gebraucht da wir an den Punkt
Das world-Objekt sieht hier folgendermaßen aus:
// baut und initialisiert statische Umgebung
world = g2().clr()
.view({cartesian,x: 220,y: 150}) // Nullpunkt verschoben
.beg({ld:[1,5,15,5], ls:"grey", lw:2})
.lin({x1:-300, y1:0, x2: 300, y2:0})
.lin({x1: 300*mec.ephi.x, y1: 300*mec.ephi.y,
x2:-300*mec.ephi.x, y2:-300*mec.ephi.y) // geht nur weil Initialzustand phi == alpha
.end()
.use({grp:g})
Hier werden nun zum ersten Mal die beg() und end() Methoden von g2 eingesetzt. Durch diese kann man Statusänderungen auf Objekte, die zwischen diesen Tags stehen beschränken. Man kann Translationen, Rotationen oder aber einfach nur Styling angeben. Mehr dazu findet man wie immer in der API-Dokumentation.
Bei diesem world-Objekt findet man neben Linienfarbe und Breite auch ein Argument das die gezeichneten Linien unterbricht, sodass daraus Strichpunktlinien werden. Der Aufbau dieses Arrays ist wie folgt: [Strichlänge1, Abstand1, Strichlänge2, Abstand2].
Man wird sich jetzt vielleicht fragen warum hier in einem Objekt, das ausschließlich statische Umgebung enthält, eine Linie über Punkte gezeichnet wird, die von einer Veränderlichen (phi(s1)) abhängen. Das geht weil die Getter die im world-Objekt referenziert sind, nur einmal beim Initialisieren abgefragt werden. In diesem Zustand (wir initialisieren s1 zu 0) sind bei uns phi und alpha, und somit auch ephi und e2 gleich. Nachdem dann die position()-Funktion erstellt wurde
function position() {
g.del()
.slider({x:mec.A.x, y:mec.A.y}, 0, {fs:"@nodfill"})
.slider({x:mec.B.x, y:mec.B.y}, -mec.alpha, {fs:"@nodfill"})
.lin(mec.A.x, mec.A.y, mec.B.x, mec.B.y, {lw:3})
.use("nod",{x:mec.A.x, y:mec.A.y})
.use("nod",{x:mec.B.x, y:mec.B.y})
}
folgt der restliche Quellcode analog zu den vorherigen Beispielen.
6.2.4 Ergebnis
Der fertige Quellcode sollte dann folgendermaßen aussehen:
<!doctype html>
<html>
<head>
<meta charset='utf-8'>
<title>Kreuzschieber</title>
</head>
<body>
<h2>Kreuzschieber - Grundfall 2</h2>
<canvas id="c" width="450" height="300" style="border-width:1px;border-style:solid"></canvas>
<br>
<label for="s1slider">s1:
<input type="range" id="s1slider" style="width:380px;vertical-align:middle;padding:0" min="-150" max="190" value="0">
<output id="s1out" for="s1slider">0</output>mm
</label>
<script src="https://gitcdn.xyz/repo/goessner/g2/master/src/g2.js"></script>
<script>
let s1 = 0, // Laufvariable
dirty = true; // wenn true gibt es was zu aktualisieren
const cnv = document.getElementById('c'),
ctx = cnv.getContext('2d'),
s1slider = document.getElementById('s1slider'),
s1out = document.getElementById('s1out'),
pi = Math.PI,
mec = {
l: 100,
alpha: 30*pi/180,
get g() { return {x:s1, y:0}; },
get e2() { return {x:Math.cos(pi - this.alpha), y:Math.sin(pi - this.alpha)} },
get s2() { var ge2 = this.g.x*this.e2.x + this.g.y*this.e2.y,
ge2g = (this.g.x*(-this.e2.y) + this.g.y*this.e2.x);
return ge2 + Math.sqrt( this.l*this.l - ge2g*ge2g ); },
// eigentlich nicht benoetigt
get phi() { return Math.atan2( (1/this.l)*this.s2*this.e2.y, (1/this.l)*this.s2*(this.e2.x - s1) ); },
get ephi() { return {x:Math.cos(this.phi), y:Math.sin(this.phi)}; },
// Gelenkpunkte
get A() { return {x:s1, y:0}; },
get B() { var s2 = this.s2; return {x:s2*this.e2.x, y:s2*this.e2.y}; }
},
g = g2(),
// baut und initialisiert statische Umgebung
world = g2().clr()
.view({cartesian:true,x:220,y:150}) // Nullpunkt verschoben
.beg({ld:[1,5,15,5], ls:"grey", lw:2})
.lin({x1:-300,y1:0,x2:300,y2:0})
.lin({x1:300*mec.ephi.x,y1:300*mec.ephi.y,x2:-300*mec.ephi.x,y2:-300*mec.ephi.y}) // geht nur weil Initialzustand phi == alpha
.end()
.use({grp:g});
function position() {
g.del()
.slider({x:mec.A.x, y:mec.A.y, w:0, fs:"@nodfill"})
.slider({x:mec.B.x, y:mec.B.y, w:-mec.alpha, fs:"@nodfill"})
.lin({x1:mec.A.x, y1:mec.A.y, x2:mec.B.x, y2:mec.B.y, lw:3})
.nod({...mec.A})
.nod({...mec.B})
}
function render() {
if (dirty) {
position(); // aktualisiere Position
world.exe(ctx); // rendert world in den Context
dirty = false;
}
requestAnimationFrame(render); // asynchroner callback von render(), keine Rekursion!
}
function sets1() {
if (s1slider.value != s1out.value) {
s1 = s1slider.value;
s1out.innerHTML = s1slider.value;
dirty = true;
}
}
/*
* Initialisierung
*/
// Eventlistener hinzufuegen
s1slider.addEventListener("input",sets1);
// Animation starten
render();
</script>
</body>
</html>